本文介绍的电路能精确控制线材滚筒的牵引电机转速。电路如图1所示。
电路工作原理
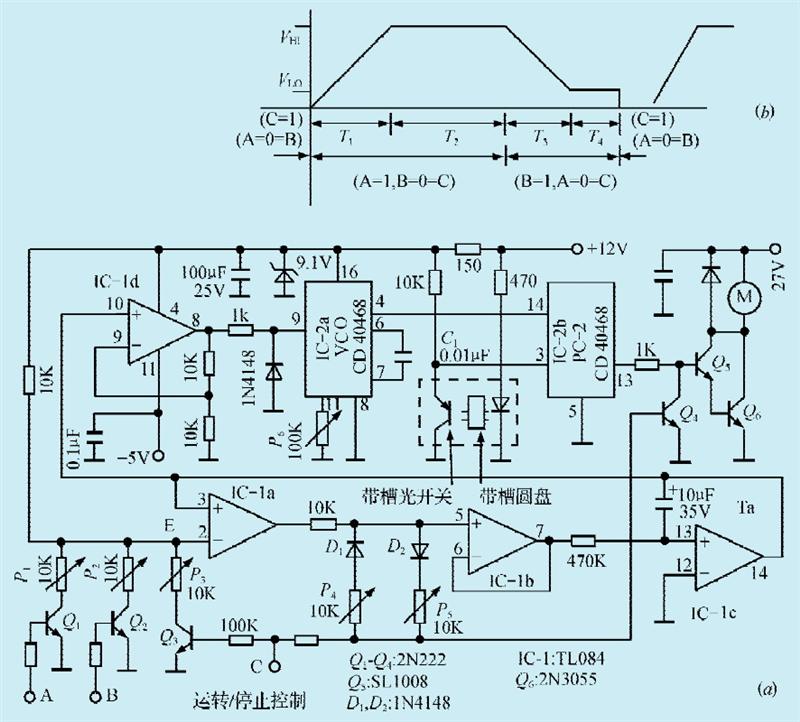
为避免线材的拉伸变形,此控制电路能实现软起动,并使电机在T1周期内加速到运行速度。并用此速度在T2周期完成大部分缠绕;电机在T3周期平滑地减速到低速,以防止被牵引材料累积在牵引端; T4周期电机低速运转,以便在牵引材料缠绕的一定长度时精确制动,见图1
在电机轴上安装有至少含32个缺口的轻型圆盘,用光断路器MOC7811检测电机速度。锁相环(IC-CK4060B)的相位比较器2(PC-2)将压控振荡器(VCO)输出的频率(fv)与光断路器的脉冲速率(fm)比较。当fv>fm时,PC-2输出通过晶体管驱动电机;若fm>fv,电机电源消失;在fm=fv时,驱动系统很快达到平衡状态。
运算放大器IC-1a、1b和1c形成三点调整积分器,它的输出电压始终平稳地达到并维持在与运算放大器IC-1a反相输人出现的指令电压(Ec)相等的状态。将数字控制输人调节到A=1,B=0=C,积分器便产生斜坡,斜坡扫描VCO频率,使电机加速运转。加速度和恒速度VHI可分别通过P4和P1预置调节。同理,在输人调到A=0=C,B=1时,积分器产生负斜波,使电机减速,预调P3和P2能分别调到所需减速度和恒速VLO。预调P3可调到电机起动的那一点,此时在第一秒内能绕约一圈。这里要注意的是,晶体管的选择要适合电机的额定值。(胡碧)

图1:一款电机速度精确控制电路

2025-03-26

2025-03-19

2025-02-26
2024-03-14
2024-02-26
24H服务热线:
 400-852-8880
400-852-8880
售后投诉:0755-23300943 / 19967322972
售后邮箱:tousu@jdbpcb.com
商务邮箱:service.pcb@jdbpcb.com
总裁邮箱:ceo@jdbpcb.com

抖音视频号

微信公众号

VR视频验厂
 800026481
800026481

{kind=link}